During summer 2021, I worked to test a novel type of assistive walker for Project WTR, the group developing the walker.
These tests compared existing types of walker with the novel type to prove that the novel type requires less force to move in certain directions, with the goal of a patent application.
As far as I know, the patent is still in the approval process. (Hence the redacted images, and lack of detail about the specific nature of the novel walker.)
Responsibilities
Sole
Designing and executing physical tests that demonstrate the novel walker’s specific value.
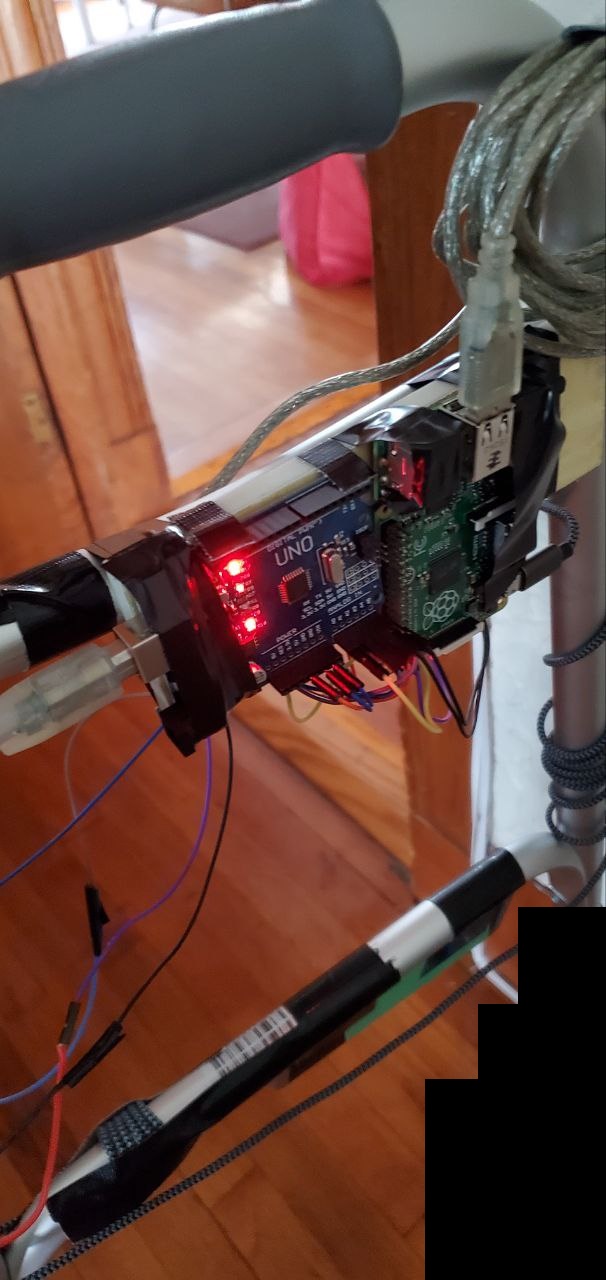
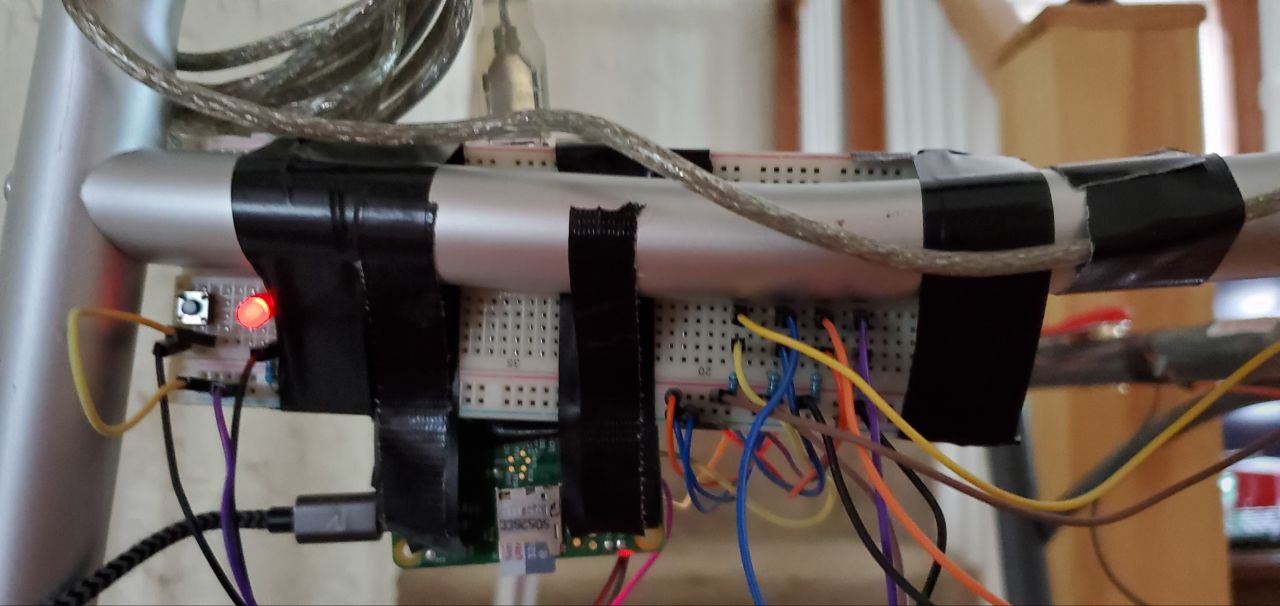
Designing and implementing a self-contained data-collection “rig” (see the header image) attached to the walker that measures relevant forces during testing.
Communicating my findings effectively to the Project WTR team.
This Arduino was wired to the pressure sensors, analogous to the microcontroller onboard a sensor breakout board.
This was my first embedded programming experience, so the script was quite simple — just processing data from the sensors and writing it out over Serial.
The script running on the Raspberry Pi was a Python script that collected data from the Arduino over Serial.
Collecting data from multiple tests was a breeze because I implemented a button that saved existing data to a new file and, after a short delay, begun collecting data again.

{kind=link}
{kind=link}
{kind=link}
{kind=link}